近期,大有时空推出的融合定位算法,成功通过了第三方机构的测试,这不仅标志着该技术的成熟,更为量产上车铺平了道路。
大有融合定位技术简介
大有时空多源融合定位引擎,结合自有的高精度定位服务和卫惯组合算法,利用多传感器融合定位技术,通过两个互补的技术方案成功应对了不同的定位挑战,使得自动驾驶在各种环境下均能保持高精度和可靠性,有效解决了在隧道、地库、峡谷、建筑物密集等场景下高精度定位的痛点和难点,为自动驾驶感知、规划、控制系统提供全场景的高精度位姿数据。
系统采用的低成本传感器,包括:GNSS/IMU、单目相机、车身底盘CAN轮速、导航级地图。其中:
GNSS/IMU提供高频率的米级精度的位姿数据、IMU数据(角速度和加速度);
单目相机提供感知结果(车道线、停止线、地面印刷物、红绿灯、标牌、灯杆);
车身底盘轮速提供四个车轮的前向速度;
导航级地图提供路网数据、定位图层。
基于以上传感器数据,本系统主要包括2个子模块:定位算法模块和地图引擎模块。 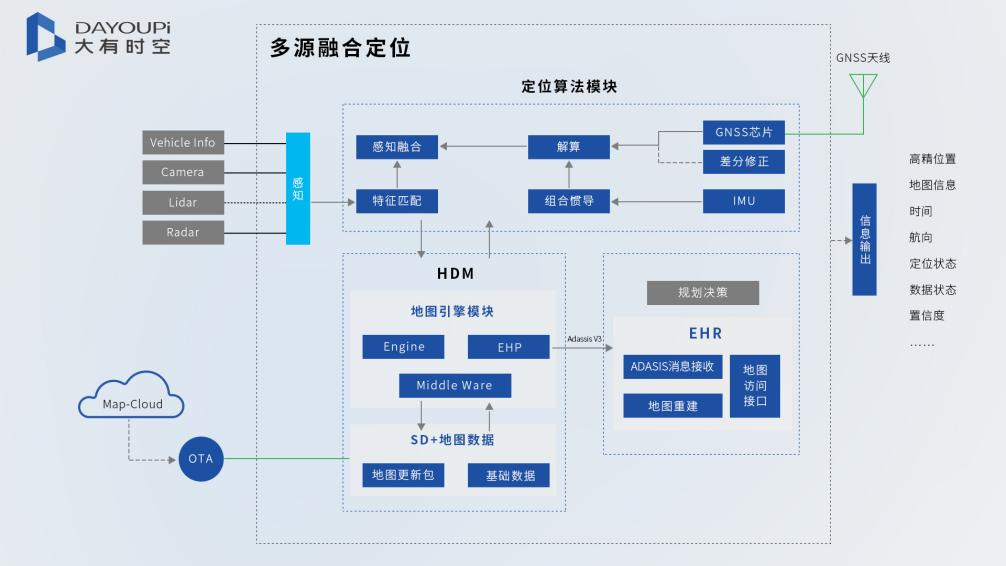 多源融合定位整体框架
多源融合定位整体框架
1)融合定位模块:接收传感器的数据,以及地图引擎子系统输出的定位图层(LocationMap),采用基于滤波的融合定位算法,对车辆的位姿进行最优估计。
2)地图引擎模块:根据车辆的位置,以及行程点,执行全局路径规划。提供车辆前方一定距离的地图数据给自动驾驶规控系统;提供车辆周边的定位图层给融合定位模块。
01
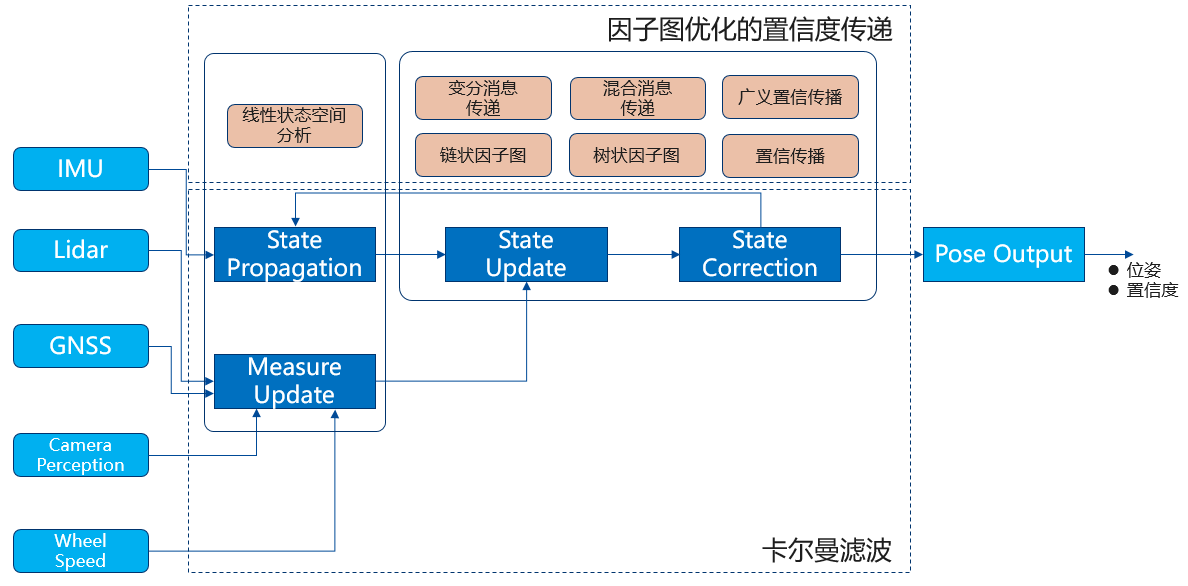
融合定位技术
由大有时空智能驾驶研究院研发的融合定位系统采用迭代误差状态卡尔曼滤波(iESKF)框架,结合因子图优化的置信度传递模型,在算法过程中,针对算力、精度要求以及不同传感器的选择,进行合理的优化与改进,以确保本系统可以实现整体的泛在高精度定位状态与结果。
02
地图引擎技术
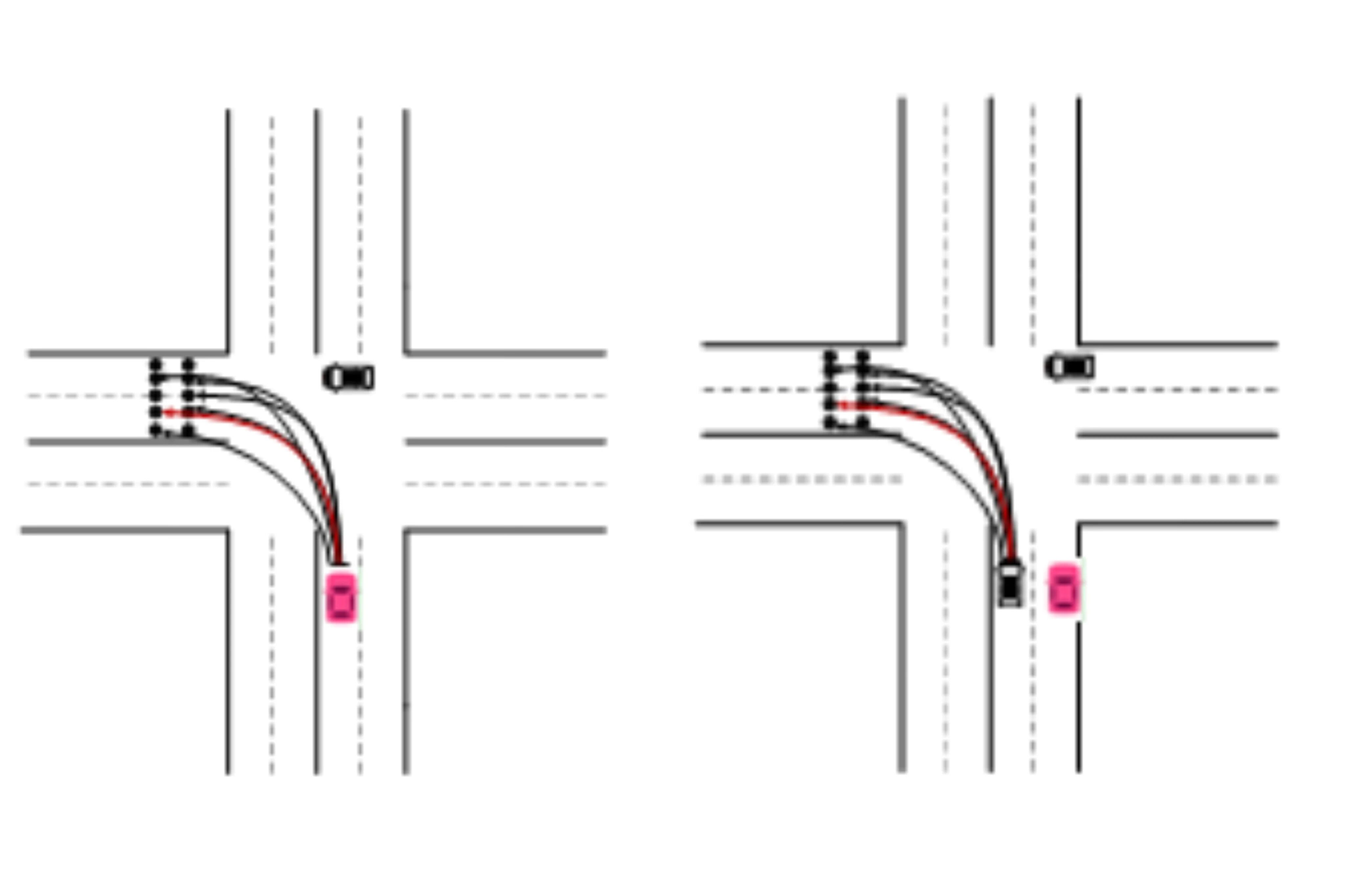
地图引擎作为地图应用的输入窗口,广泛应用于量产高级辅助驾驶方案中。大有时空地图引擎除了提供基础的路径规划、引导、ADASIS输出等功能外,为融合定位提供了产品化的局部地图方案,同时,其特色的基于数据闭环的路口引导线和通行相位,也为融合定位的位置参考、规划控制的行为预锚提供了更优的先验参考信息。
 大有融合定位通过第三方验证
大有融合定位通过第三方验证
以上成就标志着大有时空的融合定位技术实现了从实验室到真实道路环境的成功转变,这不仅是技术创新的重要里程碑,也为全球汽车制造商呈现了一个经过全面验证且极具信赖度的解决方案。
 北京测试场实拍图
北京测试场实拍图
大有融合定位产品核心指标
这些实测数据展示了大有时空融合定位技术在各种路况下的高效性能,有效证实了其实用性和安全性。这一技术不仅为整个汽车行业提供了坚实的技术基础,更为量产汽车的智能化和自动化发展注入了新的动力。  (一)高速道路测试场景
(一)高速道路测试场景 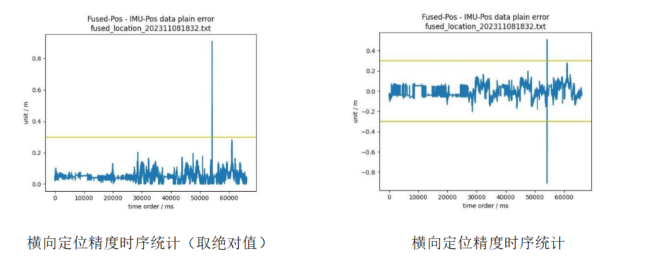 (二)城市道路测试场景
(二)城市道路测试场景 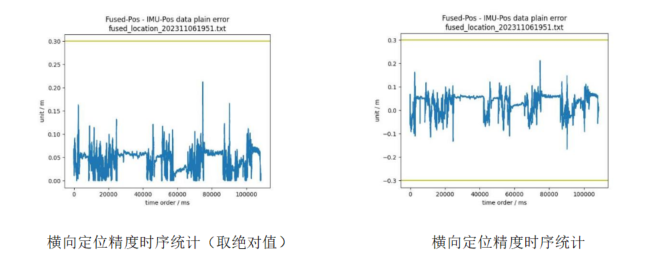 (三)全测试场景
(三)全测试场景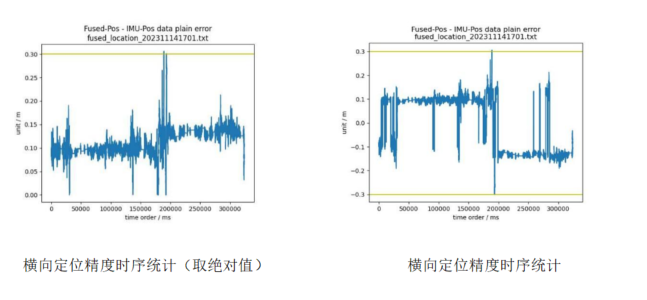
综上所述,大有时空的融合定位技术已在智能驾驶领域展示了其卓越的能力和广泛的应用潜力。通过成功的实车测试和第三方机构验证,不仅增强了该技术的市场地位,也为其在量产车辆中的应用做好了充分准备。展望未来,我们期待与更多汽车制造商携手合作,实现大有时空融合定位算法的量产上车,为全球汽车行业发展贡献自己的力量,共同开启智能驾驶的新篇章。

『大有时空微信公众号』
 关于大有时空
关于大有时空
大有时空为智能汽车、智能终端、智慧城市、智慧地信、智慧矿山、智慧农业等领域提供安全、便捷的高精度定位与时空智慧应用服务,从而满足5G+北斗+AloT融合的新科技形态下,国家对智能型、消费型社会建设,和智慧城市管理与服务的需要。


