高精度地图引擎
01
产品简介
大有时空高精度地图引擎通过低功耗车规级模块将ADAS地图/高精度地图数据加密压缩,以ADASIS标准协议为自动驾驶、辅助驾驶提供可靠、稳定的高精地图服务,在实现基础通讯功能的基础上,还展现出与多种自动驾驶整体方案的适配能力,其分布式运行能力与图层分离技术保证了数据的丰富性与准确性。同时,通过实现车端与云端的实时互联,该引擎能够持续更新并回传关键数据,不断提升导航精度和驾驶体验。此外,我们还对匹配、路径规划和引导功能进行了全面优化,使其能够适应各种复杂场景,如城市拥堵和复杂交叉路口,为自动驾驶系统提供最优化的导航解决方案,具有安全、节能、舒适的使用特性。
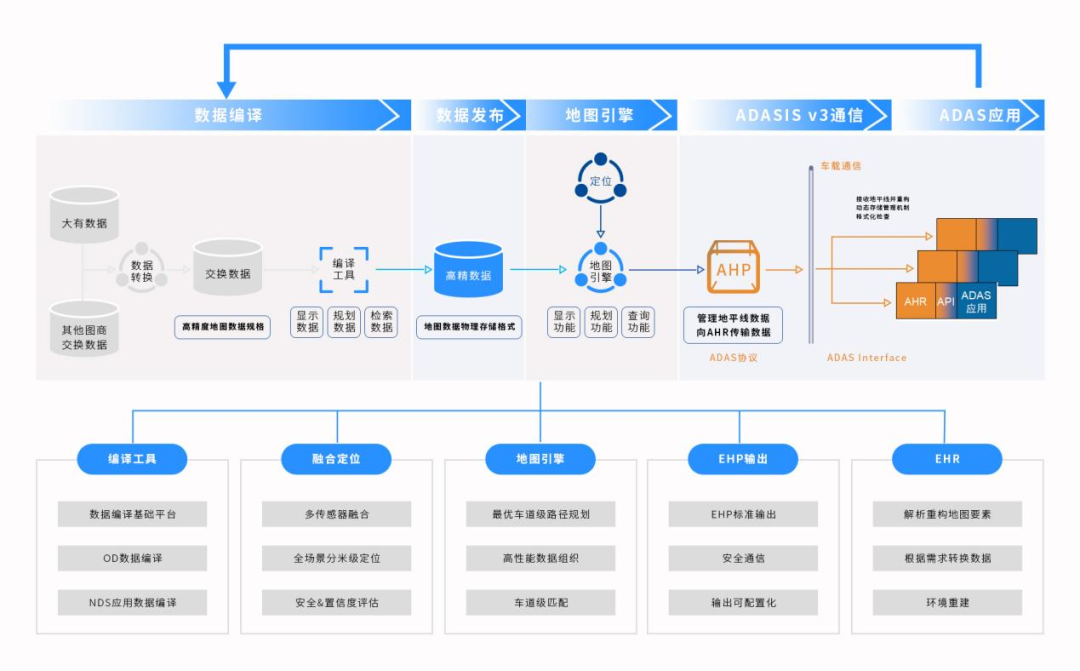
图1 高精度地图引擎系统架构图

图2 高精度地图引擎服务规格
02
产品优势
√支持定制化接口:可根据不用用户/ADAS应用/场景快速定制化接口,满足多样化应用需求。
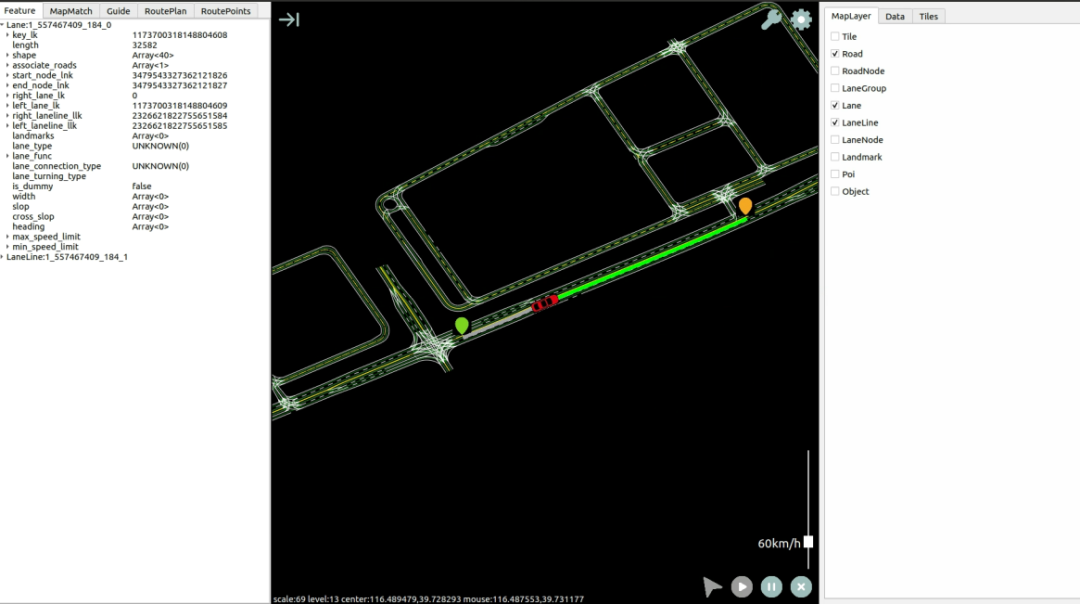 图3 EHP效果展示
图3 EHP效果展示
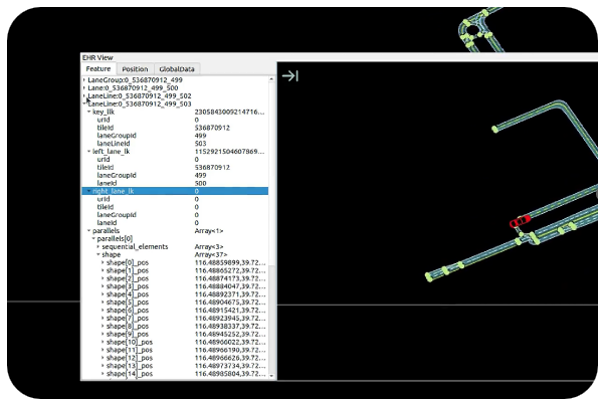
图4 EHR效果展示
配套工具链
01
高精度地图编译平台
大有时空高精度地图编译平台以高质量数据为基础,旨在为地图引擎、自动驾驶和仿真平台等提供相应的高精度地图编译服务。该平台具备处理多种地图规格的能力,不仅支持大有时空交换格式、OpenDRIVE和NDS,还能兼容我们自主研发的PMC(数据闭环)系统所构建的轻量化地图。此外,它还具备处理不同规格版本之间的差异,并支持其它地图规格的扩展。编译出的地图包括路网、车道、地物、限速等智能驾驶和仿真所需的常用地图元素。此外,该平台的设计严格遵循合规性、准确性和稳定性标准,确保能够满足各种高精度应用对地图的精确依赖,适用于准量产级的质量要求。
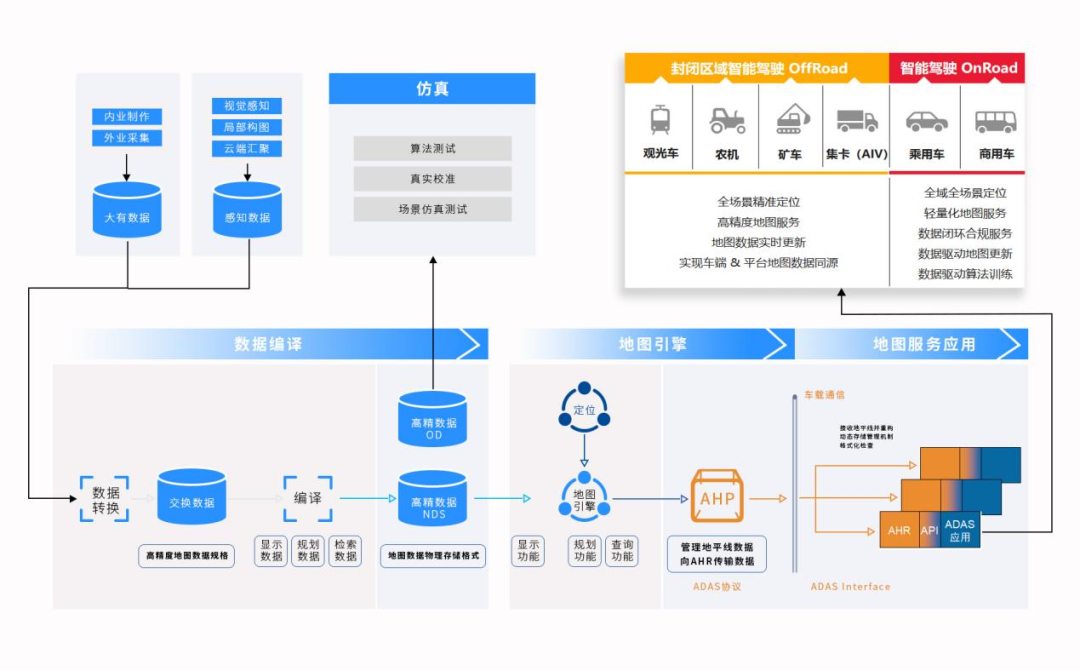 图5 高精度地图编译平台系统架构图
图5 高精度地图编译平台系统架构图
02
可视化工具
大有时空可视化工具一款综合性地图与导航软件,专为提供精确、高效的地理信息和路径规划服务设计。它集成了地图拾取、多场景适配、信息展示、路径规划等核心功能模块,并配备了工具箱、运行日志记录、行程轨迹编辑和模拟导航显示等多元功能,且用户界面友好,支持自定义设置。该工具以其数据精度、快速响应和操作灵活性为主要优势,确保用户体验流畅且高效。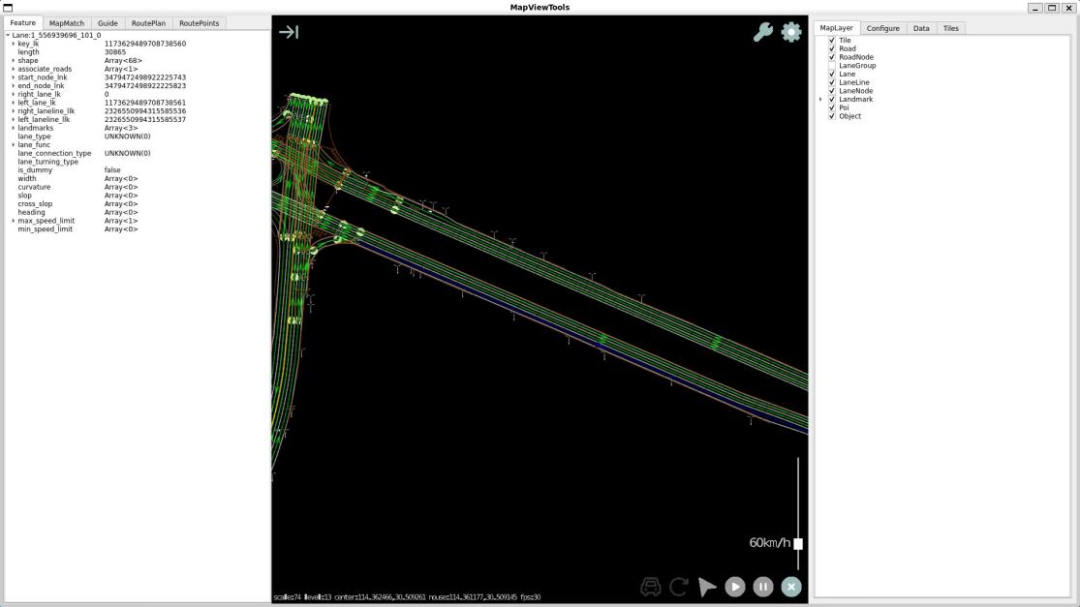
图6 可视化界面展示
应用案例
01
某智能网联汽车国家课题项目
√通过回调接口输出adasis v3结果

图7 项目架构图
02
某车企乘用车自动驾驶项目
√定制化部分只需要改动EHR
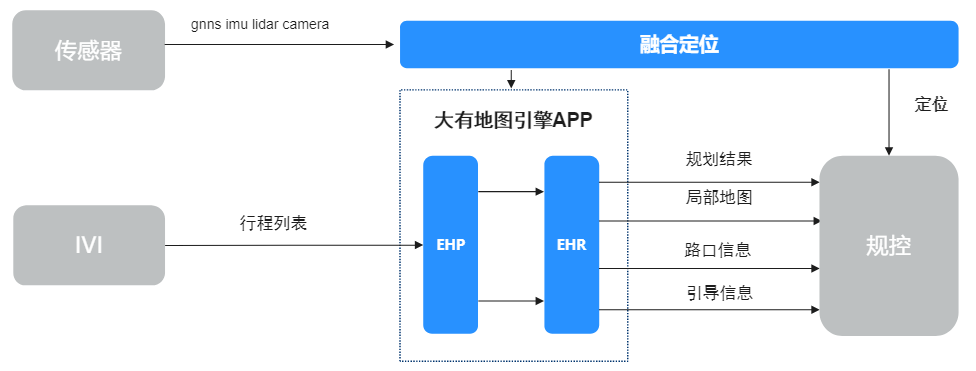
图8 项目架构图
03
某车企商用车自动驾驶项目
√感知模块通过园区基础查询接口进行动态目标物进行车道对齐
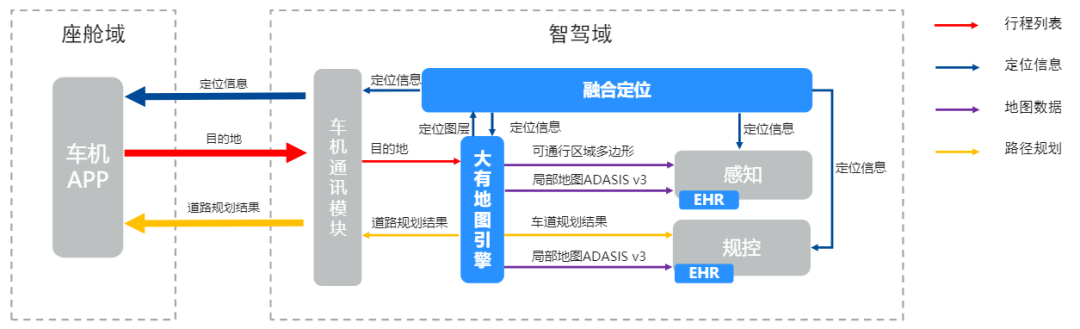
图9 项目架构图
其中,地图引擎在以上项目中均为融合定位提供了车道线形点并过滤虚拟车道线、丰富地物并可根据需要配置、车道匹配信息包括与车道边线的距离,以及可进行范围和频率的配置。同时,还为规控系统提供了路径规划,车道级路由,引导信息、车道级匹配信息、路口信息、停止线/红绿灯/标牌等地物信息。

『大有时空微信公众号』
 关于大有时空
关于大有时空
大有时空为智能汽车、智能终端、智慧城市、智慧地信、智慧矿山、智慧农业等领域提供安全、便捷的高精度定位与时空智慧应用服务,从而满足5G+北斗+AloT融合的新科技形态下,国家对智能型、消费型社会建设,和智慧城市管理与服务的需要。


