大有时空轨迹数据自动建图
01
产品简介
利用这些数据,车厂能够显著提升自动驾驶系统在定位、路径规划和决策方面的能力,进而增强自动驾驶汽车的性能和安全性。同时,深入分析用户需求和行为习惯,为产品的改进和创新提供指导,设计出更贴合市场需求的汽车产品。
02
效果展示
 图2 示范区测试数据成图前后对比
图2 示范区测试数据成图前后对比
03
核心指标
配套工具链
01
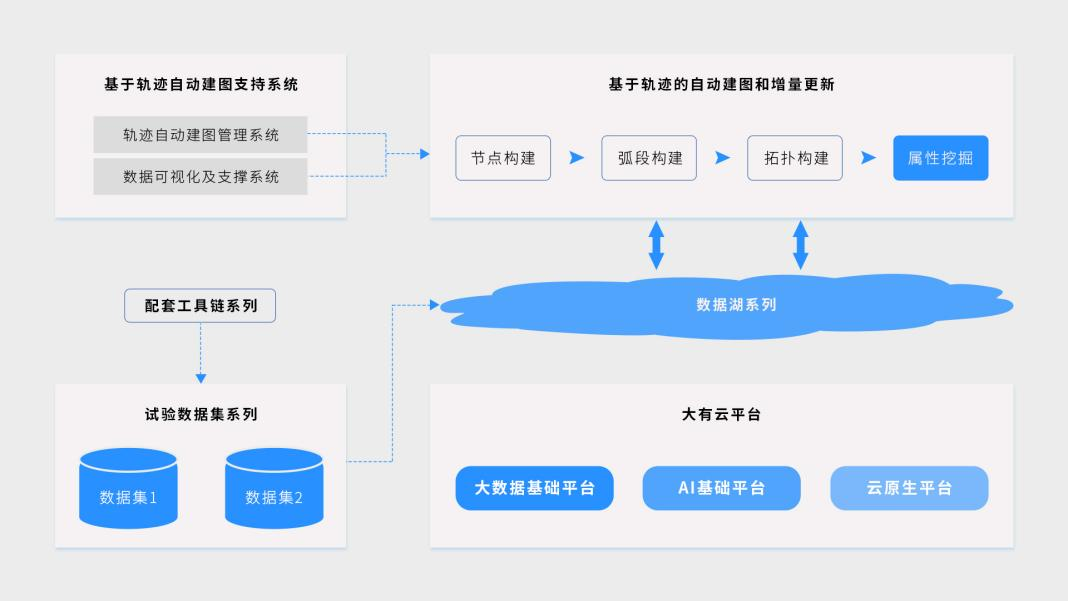
云原生数据湖底座
大有时空云原生数据湖底座采用了计算与存储完全分离的架构,支持消息实时归档建仓,提供对Spark、Flink和Presto的弹性支持,能够满足多种数据处理需求,包括在线交互式查询、流处理、批处理、机器学习等。在存储层面,该系统使用了数据湖Iceberg和云原生的分布式文件系统JuiceFS,以实现高效、统一的数据存储和管理。
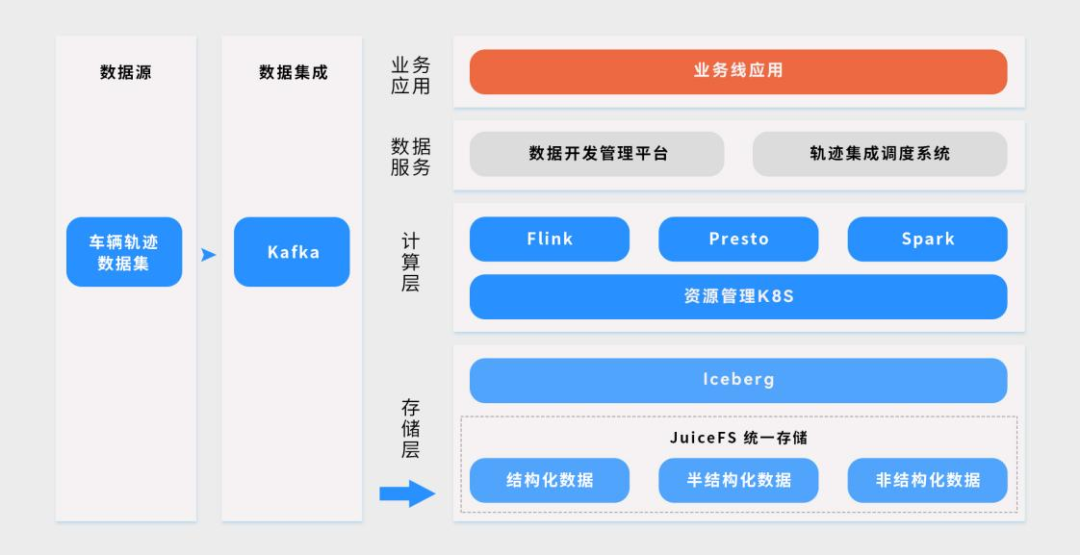 图3 云原生数据湖底座逻辑视图
图3 云原生数据湖底座逻辑视图
02
容器化集成调度系统
大有时空轨迹自动建图调度系统依托上述容器化集成调度系统,将其中的算法模块制作成容器镜像,其相互依赖关系和运行参数均可通过调度系统页面灵活配置。配置完成并上线后,系统将自动部署上述已配置的算法模块至k8s集群,其在运行过程中产生的数据将被储存至ClickHouse等存储组件,实现了算法模块的复用和解耦。
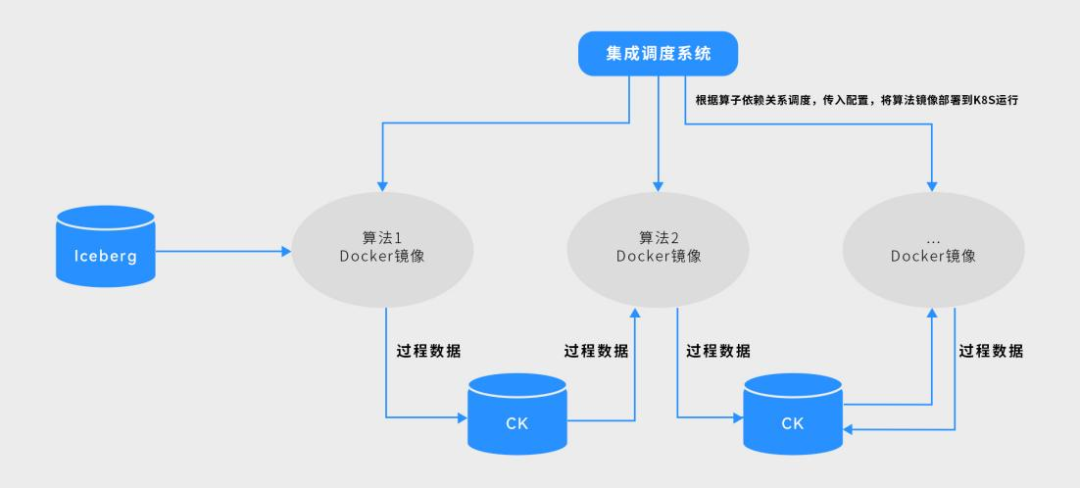 图4 容器化集成调度系统
图4 容器化集成调度系统
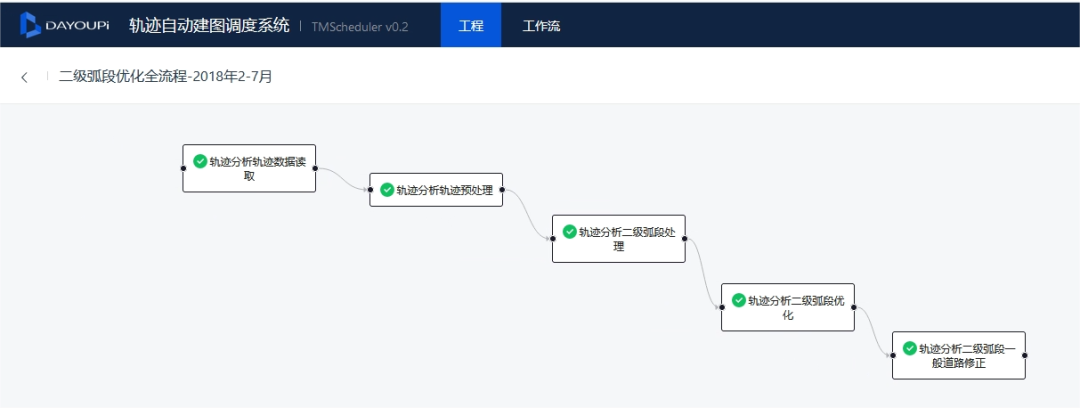
图5 轨迹自动建图调度系统

『大有时空微信公众号』
 关于大有时空
关于大有时空
大有时空为智能汽车、智能终端、智慧城市、智慧地信、智慧矿山、智慧农业等领域提供安全、便捷的高精度定位与时空智慧应用服务,从而满足5G+北斗+AloT融合的新科技形态下,国家对智能型、消费型社会建设,和智慧城市管理与服务的需要。


